Goto Dobson mit Computer Nachführung Teil 3
Wir brauchen ein Höhenrad. Mit dem Zirkel zeichne ich mir einen Kreis mit 25cm Durchmesser ein. Das ist bei mir die hälfte des Drehtellers der Rockerbox.

Ausgesägt und in die Mitte ein 10er Loch reingebohrt.


Angebaut sieht es aus , als ob es dazu gehöhren würde, oder ? Nun wie wird die Kraft übertragen ? Ich habe in die Rockerbox seitlich ein 3cm Loch reingesägt durch das ich ein Alu Rundmaterial gesteckt habe, das mit dem Höhenrad verschraubt ist. Auf der Tubusseite ist von Werk aus schon ein M10er Gewinde drin in den die Schraube passt. Zwischen dem Alu Stück und dem Kunststoff Rad des Tubus ist ein hartes Gummi.

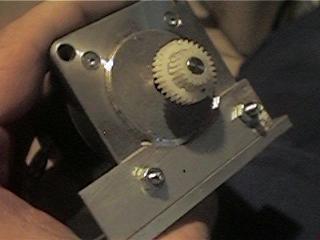
Nun hatte ich kein Getriebe das weit genug untersetzt war. Die Kraft die hier benötigt wird , ist größer als bei dem Azimut Antrieb ! Also strebte ich ein Getriebe mit min. 1:50 an. Die 75 EUR für eines von RS wollte ich nicht ausgeben, also kaufte ich mit den RB35 Motor mit Getriebe von Conrad und baute das kleine Getriebe ab.

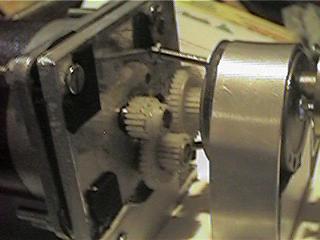
Man darf sich nicht täuschen, innen sind vorwiegend Metall Zahnräder.

Das einzige Problem ist das hier ein kleines 6mm Zahnrad in das Loch muß an dem der Motor dreht. Das wird das Haupt Problem.
Als erstes steckte ich ein Zahnrad auf die Achse des Steppers.

Dann baute ich ein kleines Zahnrad das von dem Motors die Kraft mit 1:2 auf das kleine in dem Getriebe übertragen sollte. Ob das hält weiß ich nicht. Ich habe die Welle samt Zahnrädchen aus dem Motor ausgebaut und dann mit Loctite über die kleine Riemenscheibe als Halter auf das Zahnrad geklebt. Den Zwischenraum zwischen der Achse und dem weißen zahnrad habe ich mit Heißkleber ausgefüllt. Es ist stabiler als es aussieht. Dann wirken an dieser Seite des Antriebs auch noch keine großen Kräfte.

So habe ich mir das im Zusammenspiel vorgestellt.

Nun brauche ich noch eine Trägerplatte für das Getriebe. Dazu säge ich mir wieder ein Stück Alu aus.


Dieses kleine 2mm Loch für die Achse wird nicht ganz durchgebohrt und muß 100% mit dem Zahnrad auf dem Motor passen.

Das Getriebe kann wieder zusammen geschraubt werden.

Der fertige Antrieb mit dem Getriebe und dem Zahnrad. Das Getriebe hält natürlich mit den beiden M3er Schrauben nicht alleine. Es muß auf einen Bock geschraubt werden, der die komplette Kraft abnimmt ! Das sind nun bis hier hin 1:100.

Nun muß der Antrieb ja auch ihrendwo hin geschraubt werden. Also ich brauche ein kleines Regal, das an der Rockerbox unter dem Höhenrad sitzt. Das schwarze Plastikband ist von der Rockerbox übrig geblieben. Das Tesa hält das schwarze Plastikband solange bis der Kleber fest ist.

In den Winkel feile ich zwei Langlöcher mit dennen Mann das Regal heben und senken kann.

Fertig angebaut sieht das schon ganz gut aus, oder ? :-)

Beim ersten Test habe ich gemerkt, das die Kraft des Antriebes den Tubus aus der Teflon Lagerung hebt. Also habe ich es mit einem kleinem Lager gesichert.

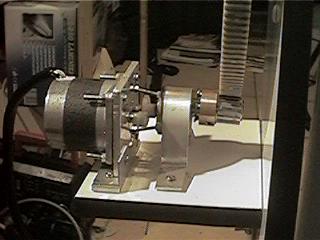
Hier der fertige Goto Dobson mit dem Laptop und allem was dazu gehöhrt. Toll ist die Anbindung des Palm Pilot. Wenn ich mit dem Stift auf ein Objekt tippe , fährt der Dob da hin ! Das geht über die LX200 Schnittstelle.

Und hier von der Seite. Media Video Clip mit laufendem Höhen Antrieb.Hier mit schnellster Geschwindigkeit. Am besten kann man die Bewegung sehen, wenn man auf Dinge im Hintergrung achtet ! Rechte Taste - speichern unter... (Läuft am besten mit Windows Media Player)
Nun muß noch die Software eingestellt werden, und eine Mords Batterie mit min 12 Ah muß her. Die Power muß ja auch irgendwo herkommen. Über den ersten Test werde ich natürlich berichten. Und wenn es klappt auch mit Langzeit belichtungen von Deepsky Objekten. Wie lange das kleine Getriebe von Conrad hält wird sich rausstellen. Zusammen ist es eine Übersetzung des Höhenantriebes von 1:1050. Hier mal die Berechnung der Übersetzung:
Altitude (Hoch/Runter):
Durchmesser = 25cm
Zahnriemen,5mm,b=16mm (Umlaufend auf Rad geklebt)
15 Zähne auf dem Ritzel (25mm Durchmesser)
Motor 200 Schritte/Umdrehung
Umfang = 250 X 3.1415, Umfang = 785,375 mm
Zähne = 785,375 / 5 , Zähne = 157,075
Übersetzung Zahnriemen =157,075 / 15 = 10,47, 1:10,5
Getriebe = 1:50, also 10,5 X 50 = 525
525 X 2 wegen Übersetzung Motor Achse auf kleines Zahnrad von Eingang Getriebe
Also Gesamt 1:1050
1050 X 200 = 210000 Vollschritte a 1,8Grad /Umdrehung 360 Grad
210000 X 2 = 420000 Halbschritte / 360 Grad (Schnellstes)
210000 X 20 = 4200000 bei Microschritt / 360 Grad (Langsamstes)
360 Grad = 86400 Bogensekunden
86400 Bogensekunden / 4200000 Schritte = 0,02 Bogensekunden Auflösung Microschritt
86400 Bogensekunden / 420000 Schritte = 0,20 Bogensekunden Auflösung Halbschritt
Danke an Willi Wacker (Starwack), der mir bei den Parameter Einstellungen geholfen hat !
Nachtrag:
Die Übersetzung war zu der nun sehr feinen des Azi Antriebes zu grob, also mußte ich auch hier etwas nachlegen. Mit einem 1:2 Zahnrad brachte ich es nun auf 1:200 zusammen sind das nun die 1:2000 die ich auch im Azi habe. Damit kommt nun das Scope Programm besser zurecht. Sobald ich die genauen Einstellungen ermittelt habe wird es noch einen Teil 4 übder die Software geben. Den Motor habe ich mit Gummi gelagert, das soll die Vibrationen etwas dämpfen die sich auf das Bild im Okular übertragen haben, bei sehr großen Vergrößerungen. Nachtrag 2: Der Abschließende Test hat ergeben, das so nun das Optimum rausgeholt worden ist. Visuell ein Genuß, dem Saturn konnte ich 45 Minuten im Okular halten ohne nachzustellen. Besser werde ich das mit den Eigenbau Getrieben nicht hinbekommen. Fotografisch reicht es für Belichtungen bis 1-2 Minuten, wenn die Initialisierung mit 2 Sternen klappt. Auf einem Frame gelandet ? Hier geht zur Hauptseite